
產品介紹
Visevi 基于視覺與電子皮膚融合的機器人觸感與識別抓握系統
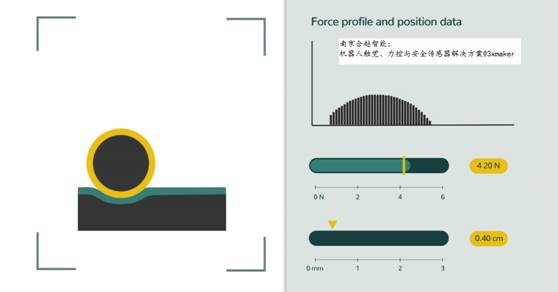
我們的智能抓取系統是適用于靈活且靈敏的抓取應用的即用型解決方案。它集成了工業抓手,立體視覺系統以及我們基于攝像頭的傳感器,用于提供觸覺數據和可選的力/扭矩。
更多機器人觸覺、力控與安全傳感器 解決方案@南京合越智能@3xmaker.com
技術解決方案:
我們的智能抓取解決方案將兩個灰度/彩色攝像頭,一個工業2爪抓取器以及通用手指集成在帶有標準安裝座的緊湊型包裝中。手指配有一層泡沫橡膠,以支持基于相機的觸覺感應。
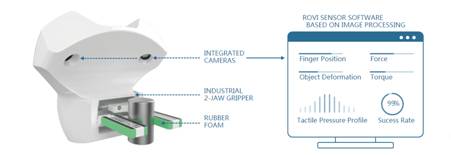
我們傳感技術的核心是圖像處理軟件,該軟件從對橡膠泡沫在接觸過程中變形的觀察中得出物理傳感器信號。因此,傳感器功能從復雜的專用硬件模塊轉移到了我們的智能傳感器軟件中。該傳感器軟件可提供有關抓握過程的豐富反饋,包括觸覺/壓力曲線,抓握力,抓爪張開,物體位置/數量,物體形狀,物體變形和詳細的抓握統計信息。利用這些數據,我們的多目標抓取控制器可以智能靈活地抓取各種物體。
更多機器人觸覺、力控與安全傳感器 解決方案@南京合越智能@3xmaker.com

我們已獲得專利的傳感器原理使您可以輕松地更換或調整機械手的手指。這是由于這樣的事實,即手指不需要布線,因為橡膠泡沫是完全無源的,并且沒有任何集成電子設備。
同時,攝像機可用于其他各種任務,例如對象識別和定位。請與我們聯系以討論您的計算機視覺要求。
產品特色:
靈敏的抓取力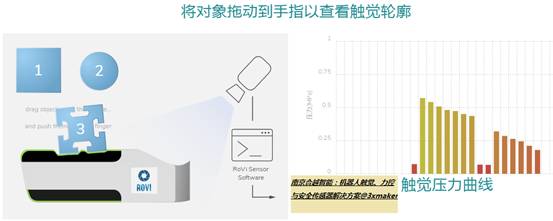
物體和深度識別
豐富的傳感器反饋
基于相機的傳感技術已獲得專利,并由慕尼黑工業大學(TUM)開發。
監控抓取過程,以確保準確和牢固的抓取。
各種機器人末端夾具支持

更多機器人觸覺、力控與安全傳感器 解決方案@南京合越智能@3xmaker.com
技術參數:
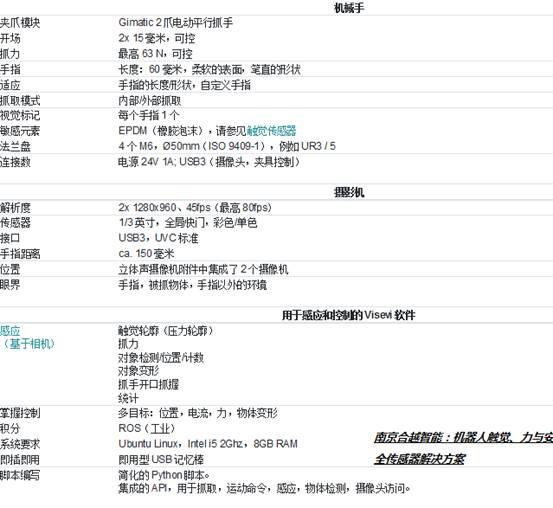
*技術數據僅描述了當前的原型。
咨詢該商品價格
品名:Visevi 基于視覺與電子皮膚融合的機器人觸覺與識別抓握系統
其他商品
-
Visevi 基于視覺與電子皮膚融合
¥機器人視覺與觸覺 -
Robotiq 自適應3指夾持器/夾爪
¥Robotiq -
Pickit 3D機器人視覺系統
¥機器人視覺