
產品介紹
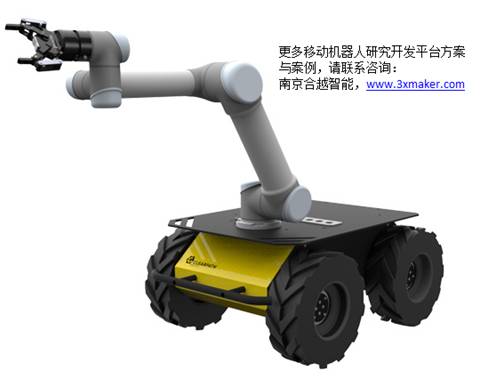
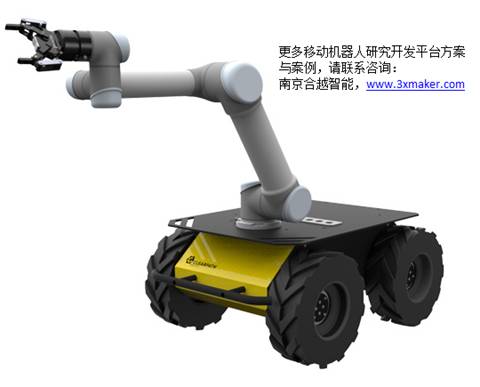
基于Husky與UR的復合操作移動機器人研究開發平臺
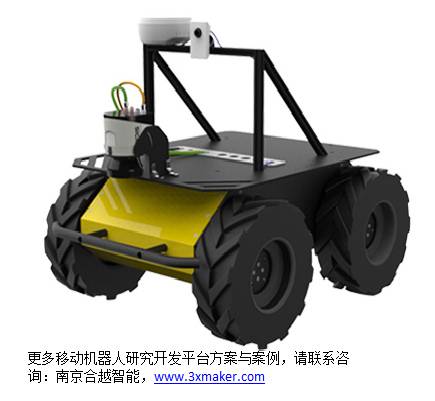
Husky(Husky)是一個clearpath中型機器人開發平臺。其巨大的有效載荷容量和動力系統可容納多種有效載荷,可根據研究需求進行定制。立體攝像機,激光雷達,GPS,IMU,操縱器等可以由我們的集成專家添加到UGV中。Husky堅固的結構和高扭矩傳動系統可以將您的研究帶到其他機器人無法企及的地方。ROS由社區驅動的開放源代碼和示例完全支持ROS。
特征
易于使用
Husky是在工廠設置中支持ROS的現場機器人平臺。使用Husky(Husky)與現有研究集成,并在蓬勃發展的ROS社區中建立不斷增長的知識基礎,以更快地開始產生研究結果。Husky(Husky)使用開源串行協議,我們為ROS提供API支持,并為C ++和Python提供選項。
地毯和全地形
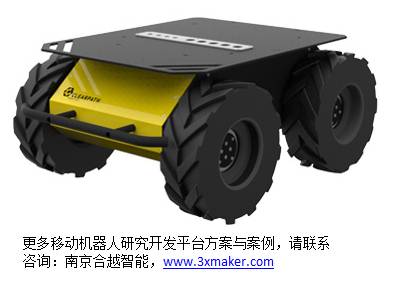
Husky(Husky)是一款優雅簡潔的設計,采用耐用的材料制成,幾乎沒有活動部件。其高性能,免維護的動力傳動系統和大型胎面輪胎使Husky能夠應對富有挑戰性的現實地形。它將持續多年的生產性研究。
值得信賴的基準
使用Husky作為測試裝置的大量研究論文已經發表。Husky為建立新的機器人研發工作提供了可靠的基準。
精密控制
Husky擁有高分辨率的編碼器,可提供改進的狀態估計和推算功能。經過微調但用戶可調的控制器,即使在低速(<1cm / s)時也能提供平滑運動曲線,并具有抗干擾性。
可自定義
我們的移動機器人專家團隊可以幫助您選擇和集成有效負載,然后在工廠配置機器人。Husky(Husky)與我們廣泛的機器人附件即插即用兼容,我們的系統集成商將提供集成的交鑰匙機器人。
技術規格
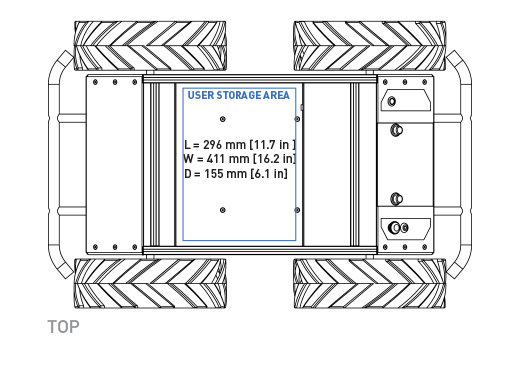
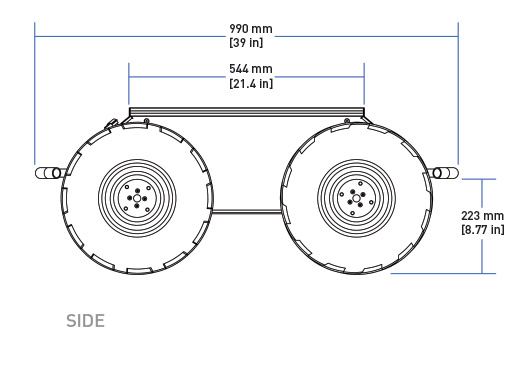
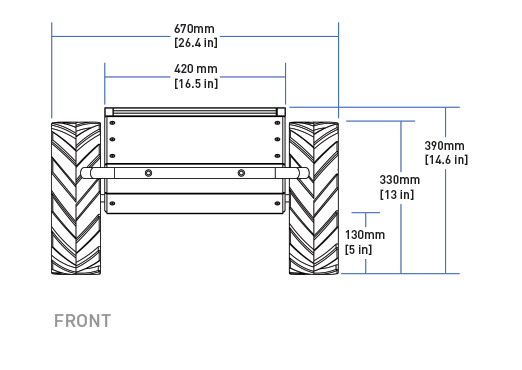
尺寸和重量
速度與性能
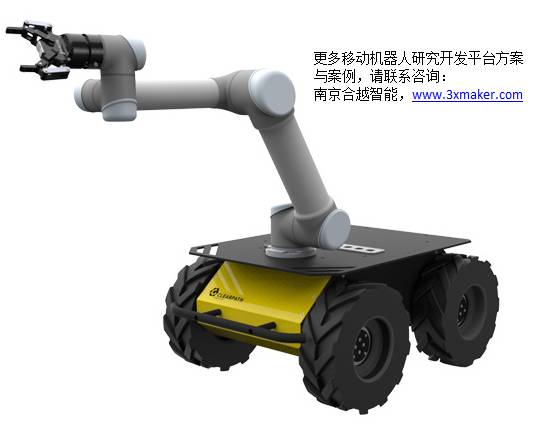
基于Husky的復合操作機器人
Husky將通過Universal Robots的UR5機械手和Robotiq的2指85mm抓手與周圍的世界互動。UR5通過自定義電子設備外殼和車輛上的電源安裝到Husky(Husky)頂板上。手臂可以延伸到0.85m并承載5kg的有效載荷,并且對人類安全。ROS完全支持UR5和Robotiq抓手,并在平臺的Mini ITX計算機系統上預裝和配置了軟件包。
示例應用
· +戶外自主導航
· +遠程檢查和遠距離遠程操作
· +更大比例的地圖和本地化
隨附配件
· + UR5機械臂
· + 2個FINGER 85 Robotiq抓手
· +頂板
· +迷你ITX電腦
· +備用電池
特色升級
· + UGV上的第二個UR5和抓爪
· + Robotiq 3指夾
· +激光雷達
· +大黃蜂BB2立體聲相機
此外,基于Husky的移動機器人研究開發底盤根據不同研究方向預設不同資源包平臺:
1、資源管理器包
配備了全套傳感器(激光掃描儀,GPS和照相機)的Husky Explorer套件可實現基本的室內和室外自主功能。預先裝有Linux和ROS的功能強大的Mini-ITX計算機系統。所有組件ROS驅動程序均已安裝并預先配置。Husky Explorer Package通過消除對設計,制造和集成系統的需求,從而節省了時間和金錢,從而加快了開發速度。
應用范例
· +戶外GPS導航
· +障礙物檢測與避免
· +本地化和映射
· +路徑規劃
· +傳感器融合
· +輔助遙控
隨附配件
o +打開IMU
o +備用電池
o +頂板
o +帶有游戲手柄的Mini ITX電腦
o + TP-Link路由器
o + LMS111激光
o + GPS
特色升級
§ + UR5通用機械臂
§ + Robotiq 3指爪
§ + Robotiq FT 150力扭矩傳感器
2、EXPLORER PRO套件
Explorer Pro軟件包提供了Explorer軟件包的更高版本。它使用先進的傳感器并進行升級,以提供遠程的戶外自主平臺。一臺50m SICK LMS-151 LIDAR可以進行長距離地形量化和制圖,而一個云臺變焦IP攝像機則可以進行遠距離遠程操作。赫斯基(Husky)裝備了抵御氣候變化的IP56防護等級,可在戶外操作,還配備了升級的鋰電池組,使系統運行時間加倍。

示例應用
· +戶外自主導航
· +遠程檢查和遠距離遠程操作
· +更大比例的地圖和本地化
隨附配件
o + GPS,IMU和Mini ITX
o + Clearpath基站
o +鋰電池
o + LMS-151激光雷達
o + IP55防水升級
特色升級
§ + Flea3相機
§ + UR5通用機械臂
§ + Robotiq 3指爪
§ + Robotiq FT 150力扭矩傳感器
更多移動機器人研究開發平臺方案與案例,請聯系咨詢:南京合越智能科技有限公司,www.knexny.com



咨詢該商品價格
品名:基于Husky與UR的復合操作移動機器人研究開發平臺
其他商品
-
franka Panda 7軸協作、觸覺敏感
¥franka 協作機器人 -
開源ROS微型智能車無人駕駛與人工
¥車聯網 無人駕駛人工智能 -
基于Husky與UR的復合操作移動機器
¥Husky UR