
產品介紹
微型智能車無人駕駛與人工智能多智能體控制系統實驗模擬平臺
科研 教學 規劃 展示
更多智能機器人、無人車及傳感器融合與運動捕捉解決方案@南京合越智能
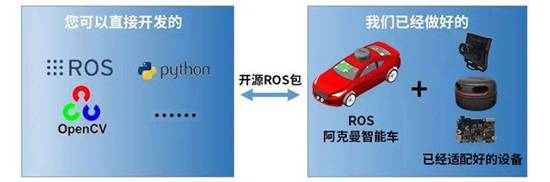
ROS全開源阿克曼轉向智能網聯無人駕駛車”已經為開發人員簡化ROS入門所需要的預備知識,編碼器、IMU、PID以及底盤的運動學模型,可以不用擔心,只需要掌握基本的Linux操作系統和ROS機器人操作系統的基本概念,就可以在ROS開源的智能小車基礎上完成機器人的控制、SLAM建圖、自動導航、避障等操作。
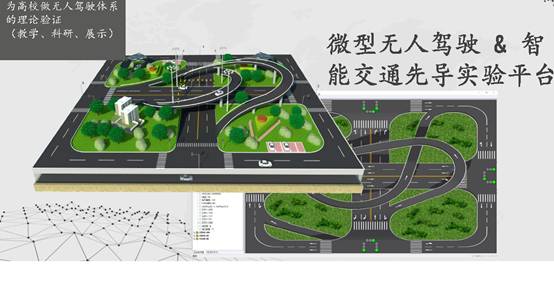
基于微型無人車的人工智能實驗平臺8大場景:
傳感器融合,
視覺檢測流量分析,
交通調度,
模擬駕駛,
安全避障超車,
車聯網規劃模擬,
多機器人協同控制,
運動定位。
8大領域研究于一身!科研教學兩相宜。
實驗平臺概況
實驗平臺項目
平臺交叉學科創新體系

科研支持
功能模塊

系統構架

涉及的技術領域

微型智能車功能

中控系統

軟件UI

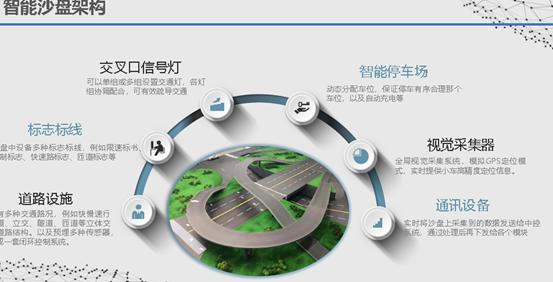
智能沙盤模擬
更多智能機器人、無人車及傳感器融合與運動捕捉解決方案@南京合越智能

咨詢該商品價格
品名:開源ROS微型智能車無人駕駛與人工智能多智能體控制系統實驗模擬平臺
其他商品
-
franka Panda 7軸協作、觸覺敏感
¥franka 協作機器人 -
開源ROS微型智能車無人駕駛與人工
¥車聯網 無人駕駛人工智能 -
基于Husky與UR的復合操作移動機器
¥Husky UR